Proceso para Robot Explorador Autónomo
Diseño y Construcción del Robot:
Diseñar el robot utilizando herramientas de dibujo o software de diseño.
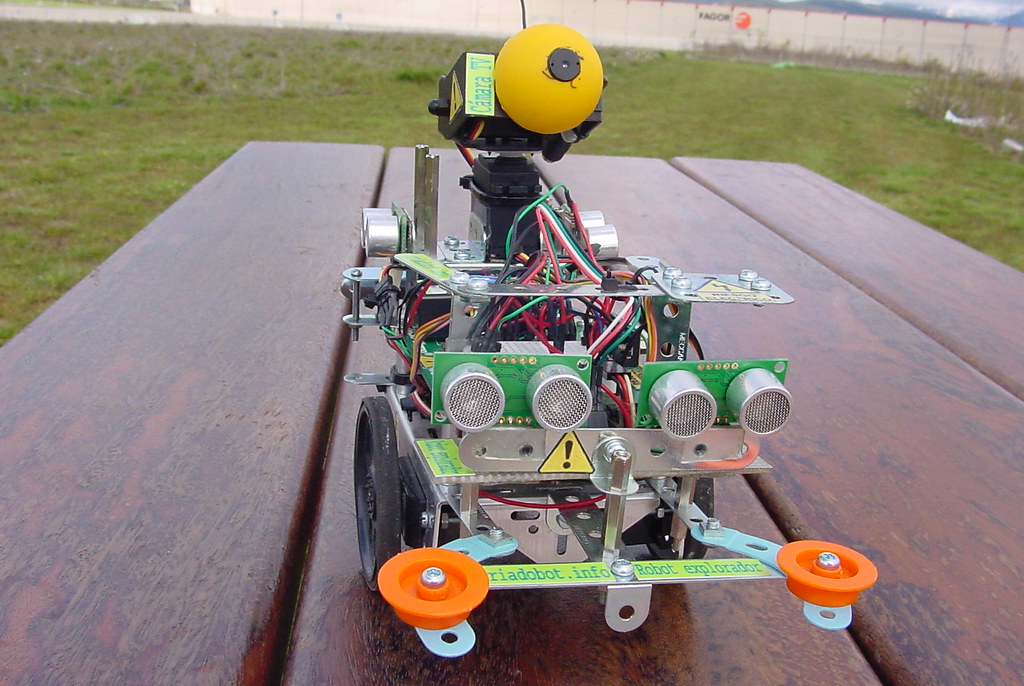
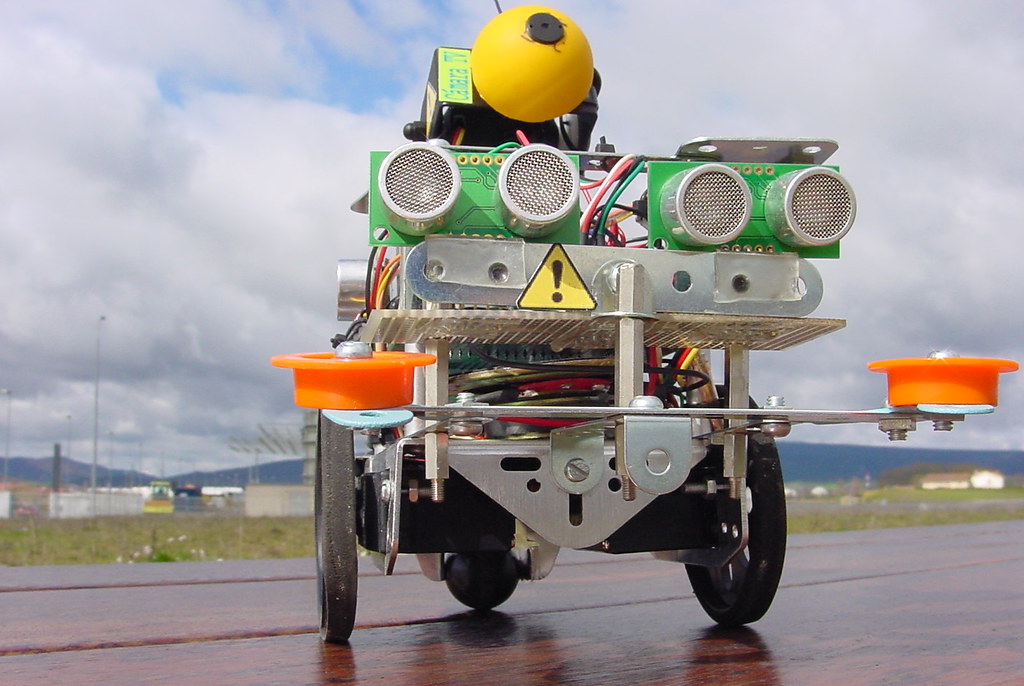
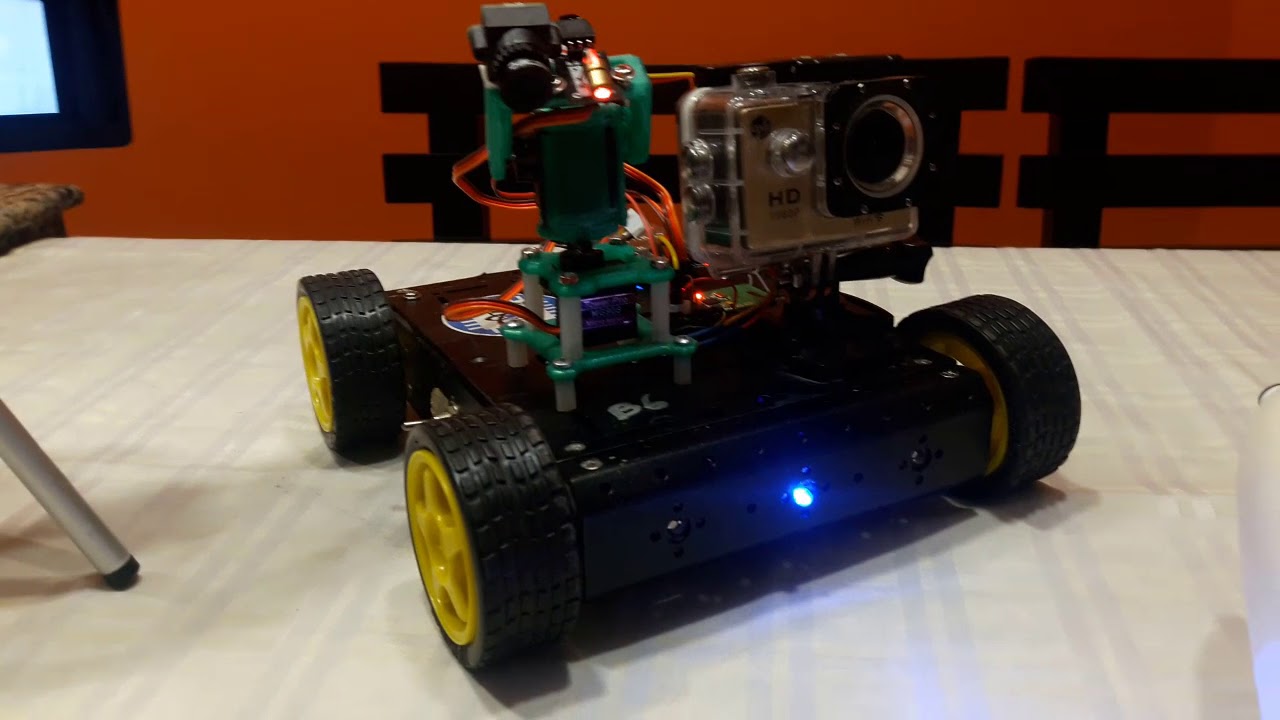
Ensamblar la estructura del robot con componentes como motores, ruedas, y sensores (ultrasónicos o infrarrojos).
Integrar una placa de control (microcontrolador) para conectar y gestionar los sensores y motores.
Programación del Algoritmo de Evasión de Obstáculos:
Programar el microcontrolador para procesar los datos de los sensores y detectar la presencia de obstáculos.
Desarrollar un algoritmo de evasión de obstáculos que permita al robot decidir la mejor ruta para evitar colisiones.
Implementar funciones de búsqueda para que el robot pueda localizar un objetivo específico en el entorno.
Pruebas y Ajuste de Parámetros:
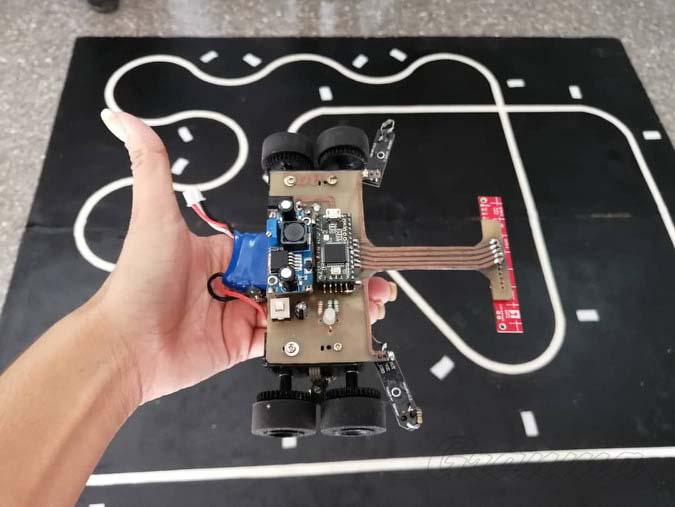
Realizar pruebas iniciales en un entorno controlado con obstáculos predefinidos.
Observar y analizar el comportamiento del robot durante las pruebas, haciendo ajustes en la programación para mejorar la detección de obstáculos y la navegación.
Probar el robot en diferentes escenarios con variaciones en la disposición de obstáculos y la ubicación del objetivo.
Evaluación y Reflexión:
Evaluar la eficacia del robot en la detección y evasión de obstáculos en entornos desconocidos.
Reflexionar sobre los desafíos encontrados durante el desarrollo y las mejoras realizadas.
Discutir posibles aplicaciones de robots autónomos en situaciones del mundo real, como rescate, exploración o inspección de infraestructuras.



.jpg)