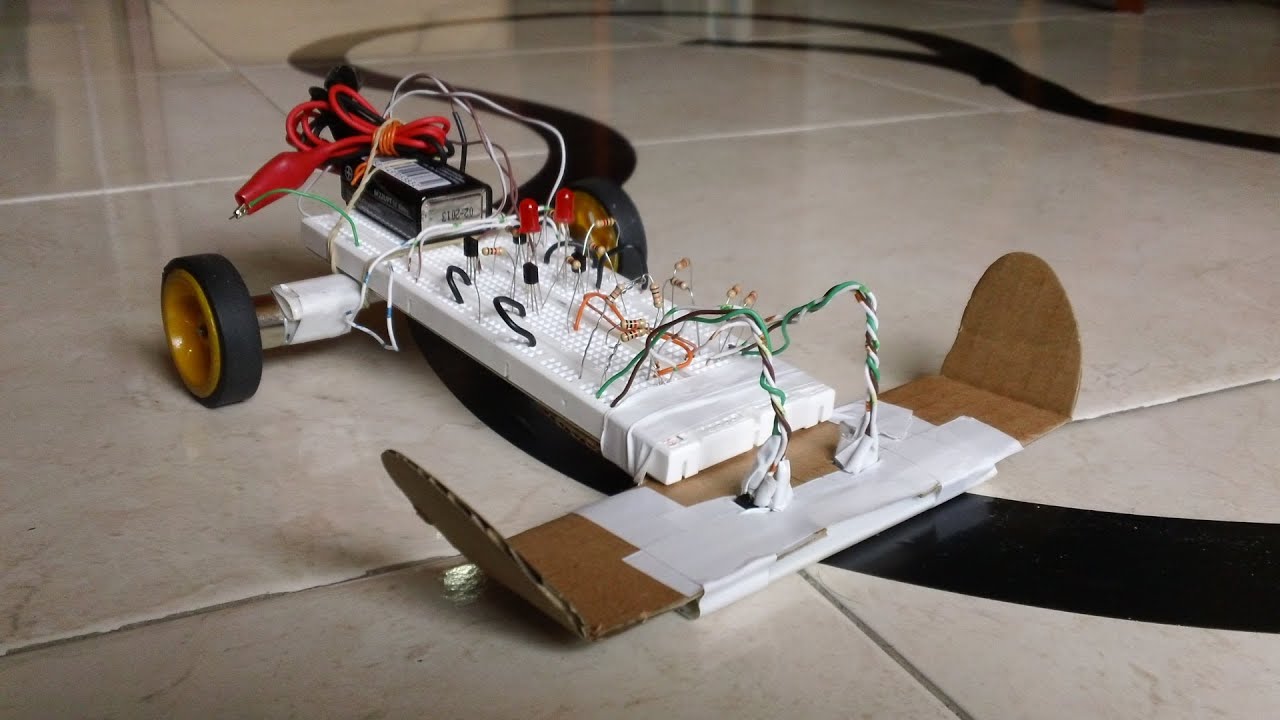
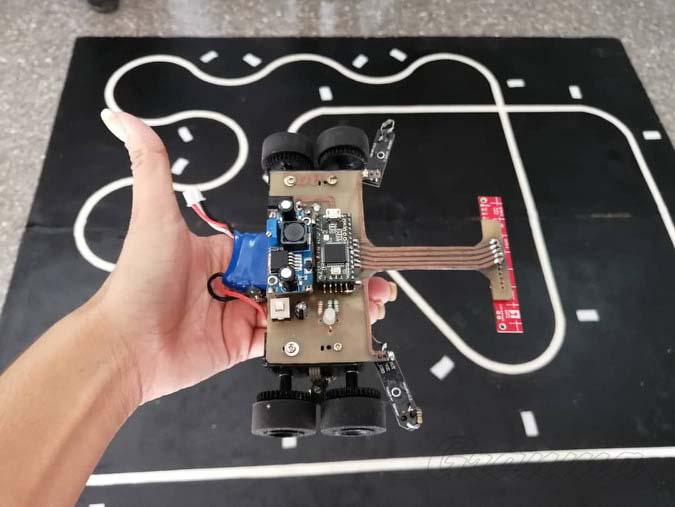
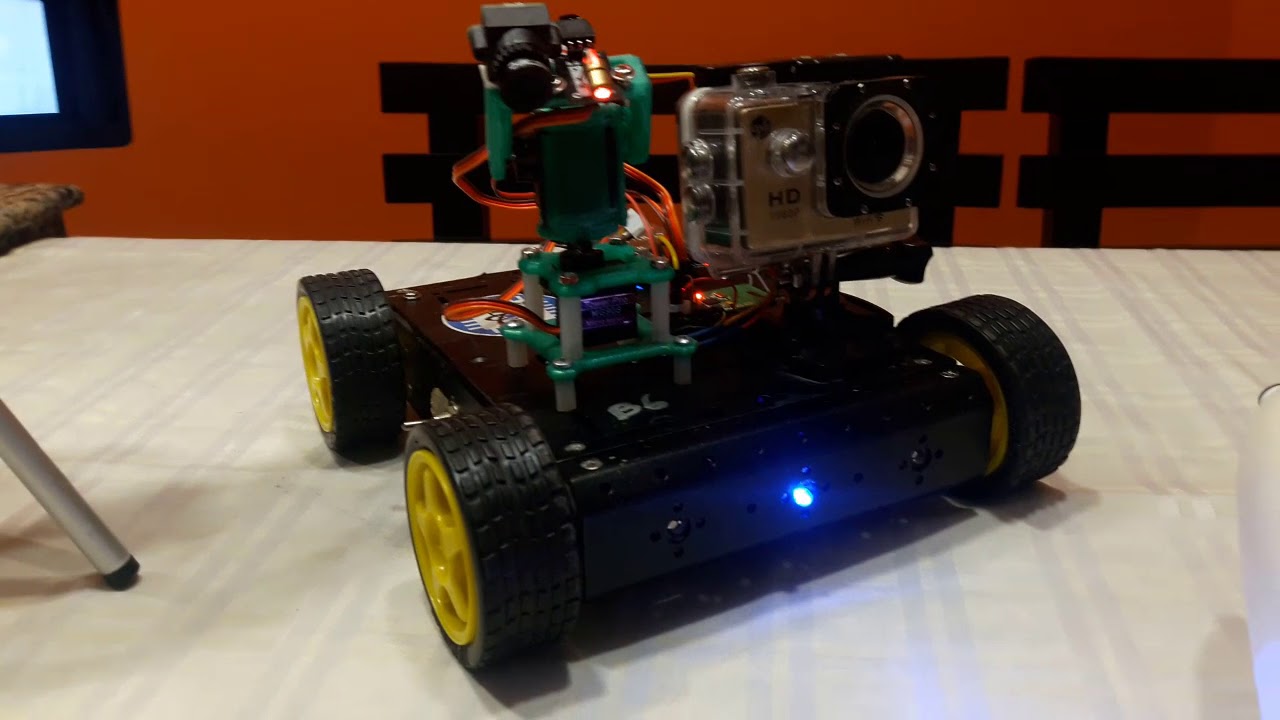
Proceso para Robot Seguidor de Líneas
Ensamblaje del Robot:
Montar la estructura del robot utilizando kits de construcción.
Instalar motores, ruedas, y sensores de infrarrojos en el robot.
Conectar los sensores y los motores a la placa de control (microcontrolador).
Programación
Programar el microcontrolador para leer los datos de los sensores de infrarrojos.
Implementar un algoritmo de control básico para que el robot ajuste su dirección en función de la detección de la línea.
Ajustar la sensibilidad de los sensores y calibrar los motores para un seguimiento óptimo de la línea.
Pruebas y Ajustes:
Realizar pruebas iniciales en un circuito de prueba con una línea marcada.
Observar el comportamiento del robot y realizar ajustes en la programación para mejorar la precisión y la velocidad de seguimiento.
Iterar el proceso de prueba y ajuste hasta que el robot siga la línea de manera consistente y eficiente.
Evaluación y Reflexión:
Evaluar la precisión y la eficiencia del robot en diferentes condiciones de iluminación y tipos de superficie.
Reflexionar sobre los desafíos encontrados y las soluciones implementadas.
Discutir posibles mejoras y aplicaciones prácticas de robots seguidores de líneas en la vida real.
de rescate



.jpg)