Proceso para Robot Rescatista en Miniatura"
Diseño del Robot Rescatista
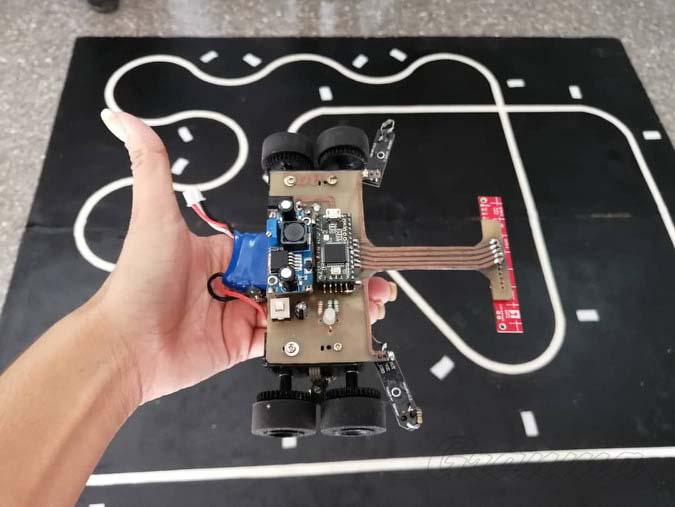
o Actividad: Los estudiantes diseñarán un robot que pueda navegar
en terrenos difíciles, seleccionando los componentes adecuados
como motores, ruedas y sensores.
o Enseñanza: Principios de diseño mecánico y selección de
hardware para robots móviles.
o Resultado: Un diseño robusto y ágil que permita al robot moverse
Programación de Navegación y Evasión de Obstáculos
o Actividad: Programación del robot para detectar y evitar
obstáculos utilizando sensores ultrasónicos o infrarrojos.
o Enseñanza: Introducción a la lógica de navegación autónoma y a
algoritmos de evasión de obstáculos.
o Resultado: El robot será capaz de moverse de manera autónoma,
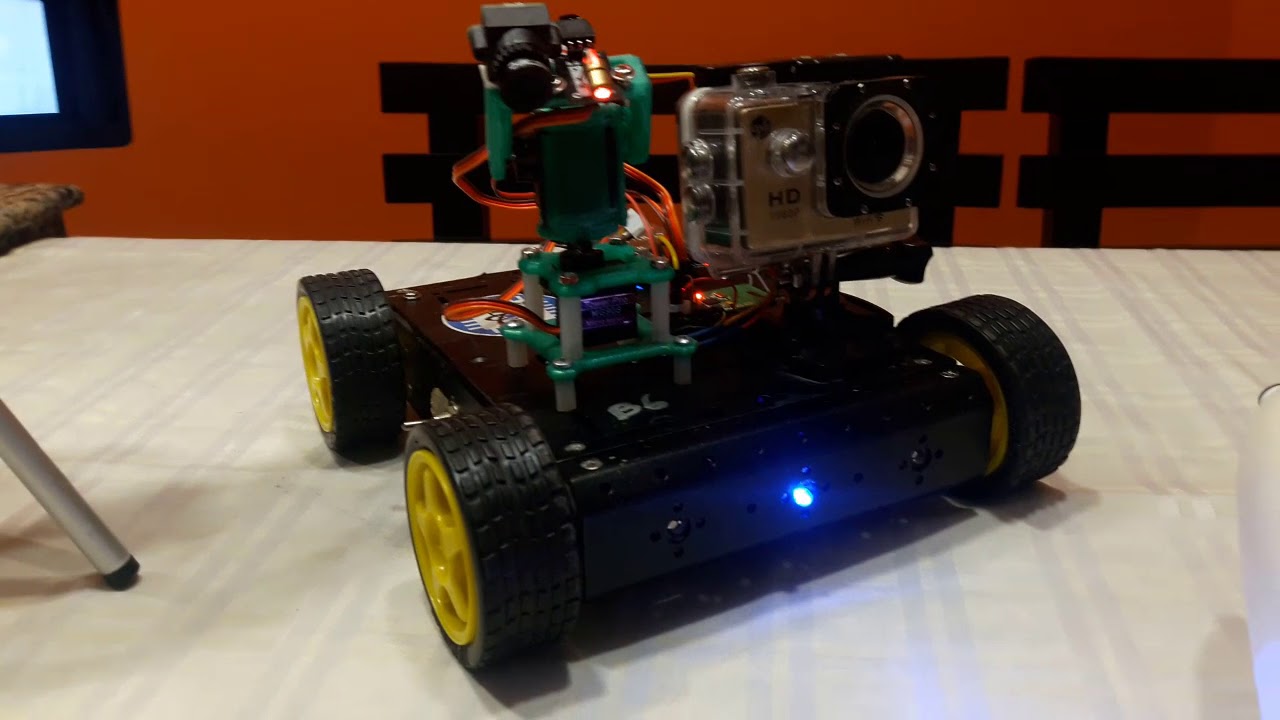
Implementación de Sensores para Detección de Víctimas
o Actividad: Instalación de sensores de temperatura o cámaras
térmicas para detectar "víctimas" en el área de desastre.
o Enseñanza: Uso de tecnologías de detección en situaciones de
emergencia.
o Resultado: El robot podrá identificar y marcar la ubicación de las
víctimas en el entorno simulado.
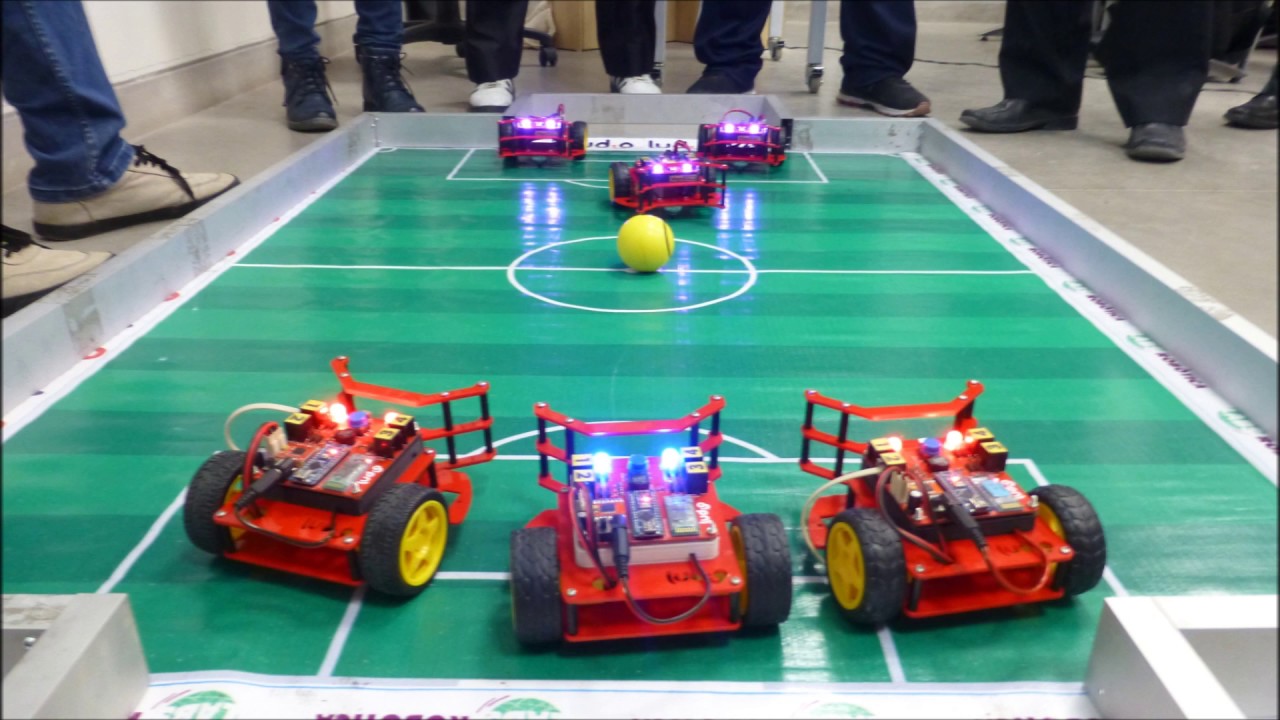
Simulación de Rescate en un Entorno de Prueba
o Actividad: Creación de un entorno de prueba que simule un
escenario de desastre, donde el robot debe encontrar y señalar
las víctimas.
o Enseñanza: Aplicación de técnicas de rescate y navegación en un
escenario realista.
o Resultado: Los estudiantes pondrán a prueba sus robots en un
entorno simulado, evaluando su capacidad para cumplir la misión
de rescate
Evaluación y Optimización del Robot
o Actividad: Después de las pruebas, los estudiantes evaluarán el
rendimiento del robot y realizarán ajustes para mejorar su
eficiencia en la misión de rescate.
o Enseñanza: Importancia de la evaluación y la mejora continua en
el desarrollo de tecnologías.
o Resultado: Un robot optimizado y funcional capaz de realizar
tareas de rescate en un entorno simulado





.jpg)